![]()






|
|
|
|


02
10
12
19
25
26
MD120B

특 징 : 4채널 레코더 내장
와이어 로프 내의 결함의 위치 정밀 분석
* 메모리용 디스켓 슬롯 내장 (100 개 item 저장)
* 결함이 조밀하게 생성된 부분의 그래프를 자세히 볼 수 있는 줌 기능
* 8∼ 85 mm dia rope 검사
* 검사 결과를 메모리에 저장하거나 컴퓨터로 전송
* 대용 (밧데리 사용)
* 크 기 : 475 x 370 x 175 mm
* 무 게 : 13 kg



MD120B WIRE ROPE DEFECTOGRAPH
와이어 로프 비파괴 측정기
Meraster는 1979년부터 와이어 로프 테스트기를 전 세계에 공급해 왔습니다.
이 NDT 계측기는 폴란드에서 개발되어 전 세계에서 사용되는 영구 자석 방식을 기반으로 합니다.
Meraster 의 감지 헤드의 표준 범위는 로프 직경 8 ~ 90 mm 이며, 헤드를 맞춤 설계할 수도 있습니다.
작은 밧줄의 경우에는 MD-20 휴대용 테스트기를 사용해도 됩니다.
최근 Meraster에서 개발한 MD120 기록 시스템에는 컴퓨터 전송 가능하며 추가 데이터 기록을 할 수 있는 휴대용 차트 레코더가 포함되어 있습니다.
이는 산업 환경에서 로프 전문가의 특별한 요구를 충족시키기 위해 설계되었습니다.
특징

- * 로프의 전체 길이와 깊이를 통해 결함 위치 감지
- * 수학적 적분법을 사용하여 고밀도 결함을 쉽게 판독
- * 기록된 결함을 줌 리플레이
비파괴 검사 시 로프에서 얻을 수 있는 최대한의 정보를 제공합니다.
MD120 B DEFECTOGRAPH

로프 사이즈 범위
|
8 ~ 85 mm | |
|
GP-1 type 헤드 |
30 ~ 85 mm |
|
GP-2 type 헤드 |
20 ~ 60 mm |
|
GP-3 type 헤드 |
10 ~ 30 mm |
|
GP-4 헤드 |
10 ~ 26 mm |
|
GP-5 헤드 |
10 ~ 15 mm |
|
GP-6 type 헤드 |
8 ~ 14 mm |
|
Hand-held tester MD-20 as a head |
8 ~ 22 mm |
|
GM series light-weight heads |
10 ~ 90 mm |
로프 종류
Ferromagnetic steel, any form of construction
로프 결함 탐지
defects characterised by stepwise changes in rope cross-section, i.e. broken wires, pitting corrosion, etc., are detected using inductive sensors in all heads
- larger losses in a rope's metallic cross-section, i.e. wear, corrosion in longer length etc. are detected using additional Hall-effect sensor in GP-1(h), GP-2(h),
GP-3(h) and GM series heads - real distortion
탐지 가능한 결함
all important defects to estimate rope deterioration; maximum sensitivity may be as high as 0.05% of nominal rope metallic cross-sectional area (but such defect readability depends on the rope's construction)
Defect positioning on rope length
with rope length converter RI, mounted in heads GP-1 type, GP-2 type, GP-3 type, GM or separate for others
Defect positioning of depth inside rope
with heads equipped with double inductive sensors ("inner" and "outer"), i.e. heads GP-1 type, GP-2 type, GM
작동 환경
|
온도 |
-25° ~ + 40° C |
|
종이에 기록시 온도 |
0° ~ + 40° C |
|
상대 습도 |
~ 95% |
|
종이에 기록시 온도 |
25 ~ 85% |
MD120B DEFECTOGRAPH
- SIGNAL RECORDER

활용 범위
This instrument is intended to record signals from magnetic sensing heads for testing wire ropes. It may also be direct applied to recording other electric signals within its sensitivity range 1mV/mm to 3.2 V/full scale or it may be customised to record within another required range, from 50 µV/mm.
메인 모드
- chart feed at constant selectable speed
- chart feed synchronous to rope movement
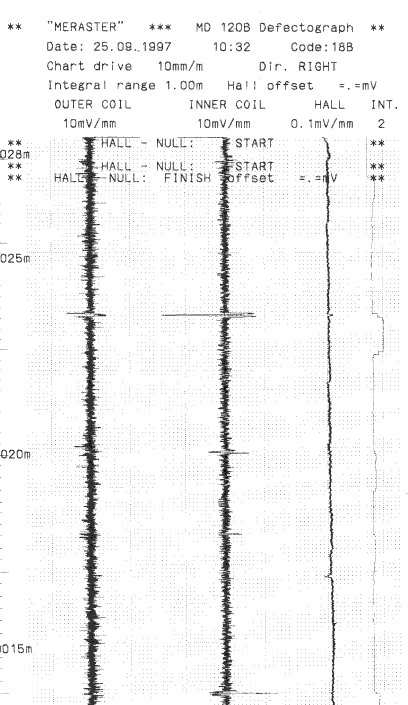
기록 채널
- 4 measurement channels -
- 2 channels of inductive sensors (coils) signals,
- 1 channel of Hall-effect sensor signal,
- 1 channel of mathematical integration of the inductive signal,
- rope length printout in meters by 5 cm of chart,
- time marks every 1 second and 10 seconds
- printout of recorder settings, rope code settings, time and date
예시
와이어 로프 테스트 차트
기록 방법
Thermal array line printing head, printing on thermal paper on a roll 112 mm x 25m
- resolution 8 dots/mm
- channel format - overall width 103 mm
- Induction channels ± 18 mm each
- Hall channel ± 9 mm
- Integral channel 9 mm
- grid every 1mm and 10 mm in separate channels
로프 스피드 범위
0.05 ~ 10 m/s
디스플레이 로프 스피드 범위
0.05 ~ 9.99 m/s by 0.01m/s, over range indicated
로프 길이 디스플레이 범위 1 ~ 9999 m by 1 m reversible, up/down counting option, initial length setting capability
길이 컨버터 input
2 x 100 pulses/m (type RI)
Paper chart drive
1, 2, 5, 10 mm/m of rope or 1, 2, 5, 10 mm/second at synchro-feed rope speed should be limited
|
at 1 mm/m to 7.0m/s |
|
at 2 mm/m to 7.0m/s |
|
at 5 mm/m to 3.6m/s |
|
at 10 mm/m to 1.8m/s |
"Zoom replay" ratio 20 mm/m of rope or mm/s
"줌 리플레이" memory capacity 18.75 m of rope or 18.75 seconds of recording
로프 결함에 따른 음성 시그널
10, 20, .... 90% of full scale of the inner sensor channel (beeper and also headphones)
"세팅 & 로프 코드" 메모리
Capacity 100 items
Indicators
- liquid crystal display 2 x 40 characters
- RUN or STOP
- LED indicator POWER ON
- LED indicator PAPER OUT
- multicolour LED indicator of battery charging
다이아그램 메모리 (옵션 메모리 카드)
|
종류 |
SRAM Memory Card |
|
|
PCMCIA type I or II, | ||
|
용량 |
512 kB to 4 MB, i.e. | |
|
300 to 2400 m of rope at synchro mode | ||
|
or 300 to 2400 seconds (40 min) of recording | ||
|
기록 데이터 |
3 signal channels + integral channel | |
|
at sampling rate 2.5 mm or ms | ||
|
recorder settings, rope code, time, date | ||
|
rope length counter | ||
|
데이터 재생 |
• printing selected sectors with MD120 | |
|
• with computer and software tools |

다이아그램 메모리에서 컴퓨터로의 데이터 전송시 필요한 인터페이스
PCMCIA port & professional, byte level software driver
민감도 범위
Outer and inner coil channels
- sensitivity at constant chart feed in mm/s and at synchro mode (mm/m), for rope speed 1m/s: 1, 2, 5, 10, 20, 50, 100, 200 mV/mm , at input resistance 21.5 kohm
- actual sensitivity at synchro mode
- for rope speed 0.05 to 10m/s depends on: "nominal sensitivity" x "value of rope speed in m/s"
- at speed less than 0.05 m/s: as for 0.05 m/s (max. sensitivity 1 mV/mm x 0.05 = 0.05 mV/mm)
Hall-effect sensor channel
- 0.1, 0.2, 0.5, 1, 2, 5, 10, 20 mV/mm
- differential input voltage
with DC component cutting, 0-400 mV
Integral of inductive signal
- 4 sensitivity levels
- running integral range 0.1 to 9.99 m or s
전원
- AC Mains 220 V, 80 VA; other AC Mains voltages on request
- DC 12 V, 50 W
- Internal rechargeable battery for 4-6 hours of operation without external power
- deep discharge protection
- recharging while external power is connected
크기
47.5 x 37 x 17.5 cm
무게
표준 액세서리 포함 13 kg

